

Эффективность использования тренажёра «ЭкзоБот» детьми с церебральным параличом
В обзоре тренажёра «ЭкзоБот» авторы проводят сравнение нормальной и патологической биомеханики ходьбы детей с ДЦП с использованием Амстердамской классификации патологической походки.
Детский церебральный паралич (ДЦП) характеризуется непрогрессирующим поражением головного мозга, но прогрессирующим каскадом вторичных заболеваний опорно-двигательного аппарата. Характерные изменения при ДЦП вызывают дисфункцию голеностопного, коленного и тазобедренного суставов, что сказывается на биомеханике ходьбы и приводит к трансформации последней в патологическую.
Цель работы: определить влияние тренажёра «ЭкзоБот» на биомеханику ходьбы детей с ДЦП. В обзоре авторы проводят сравнение нормальной и патологической биомеханики ходьбы детей с ДЦП с использованием Амстердамской классификации патологической походки, которая включает 5 типов в зависимости от положения коленного сустава и стопы по отношению к горизонтальной поверхности в фазе середины опоры. Несмотря на уровень развития ребёнка с ДЦП по классификации больших моторных функций и тип походки по Амстердамской классификации, все дети в фазе движения начинают контакт не с пятки, а с переднего отдела стопы. Это влечёт за собой ухудшение контроля баланса туловища и повышение затрат энергии на вертикализацию.
Походка ребенка с ДЦП в тренажёре «ЭкзоБот» за счёт фиксации стопы, голеностопного сустава и системы карабинов и эластичных тяг начинается всегда с пятки. Тем самым формируются правильный паттерн шага и мышечная память у ребёнка с ДЦП. Отмечается улучшение контроля за балансом равновесия со стороны больного ДЦП, повышается его мотивация к двигательному развитию.
Цель и Методы
У больных с детским церебральным параличом (ДЦП) при непрогрессирующем поражении головного мозга всегда наблюдается прогрессирующий каскад вторичных форм патологии опорно-двигательного аппарата. Существует система классификации больших моторных функций при ДЦП — Gross Motor Function Classification System (GMFCS), которая основана на оценке самопроизвольных движений с акцентом на умении сидеть, перемещаться и менять положение тела. Походка ребёнка с ДЦП, независимо от уровня GMFCS, всегда будет отличаться от походки ребёнка с типичным развитием.
У всех детей с ДЦП в той или иной степени присутствуют характерные изменения, приводящие к патологической походке: отсутствие избирательного мышечного контроля; сохранение примитивных рефлексов; аномальный мышечный тонус; дисбаланс между мышцами-агонистами и мышцами-антагонистами; дефицит реакций, направленных на поддержание баланса. В связи с этими изменениями развивается дисфункция голеностопного сустава, обусловленная аномальным положением сустава и стопы в сагиттальной, фронтальной и горизонтальной плоскостях. Дисфункция коленного сустава также обусловлена изменениями в саггитальной плоскости, аналогичными изменениям в голеностопном суставе (аномальная установка сустава или аномальная амплитуда движений, контрактура, недостаточность мышц). Различают 4 вида первичных нарушений функции коленного сустава: скачущий, припадающий, тугой и рекурвация коленного сустава. Тазобедренный сустав имеет изменения во всех трёх плоскостях за счёт изменённого тонуса приводящих, подвздошных и тонких мыщц.
Изменения в крупных суставах нижних конечностей приводят к нарушению нормальной биомеханики ходьбы (изменению в фазах цикла шага). Если у пациента с типичным развитием фаза контакта определяется контактом пятки с горизонтальной поверхностью, то у больного ДЦП всегда фаза контакта характеризуется либо контактом всей стопы, либо передним отделом стопы. Как следствие, при движении ребёнок с ДЦП теряет перекат через пятку, а иногда и через голеностопный сустав. Патологический паттерн шага при ДЦП хорошо демонстрирует Амстердамская классификация нарушения походки, которая была разработана в Медицинском центре Университета Vrije Universiteit (Амстердам) в сотрудничестве с профессором Жюлем Бехером, и включает 5 типов походки в зависимости от положения коленного сустава и стопы по отношению к горизонтальной поверхности в фазу середины опоры.
При первом типе походки в фазе середины опоры стопа нагружается полностью, колено — в физиологическом положении. Тем не менее фаза контакта начинается с контакта передним отделом стопы, что обусловлено слабостью передней большеберцовой мышцы и укорочением икроножной мышцы из-за её спастичности.
При втором типе в фазе середины опоры стопа также нагружается полностью, но коленный сустав находится в положении рекурвации. Это связано со слабостью передней большеберцовой мышцы и некорректной активацией трёхглавой мышцы. Цикл шага, как и при первом типе походки, начинается с контакта передним отделом стопы или всей стопой, но не пяткой.
При третьем типе походки в фазе середины опоры отмечается опора только на передний отдел стопы, при этом коленный сустав находится в положении рекурвации. Это положение связано со слабостью передней большеберцовой мышцы и слишком ранней и/или сильной активацией трёхглавой мышцы. Цикл шага при третьем типе походки начинается с опоры на передний отдел стопы и исключает перекат через пятку и голеностопный сустав.
При четвёртом типе походки в фазе середины опоры отмечается опора только на передний отдел стопы при согнутом коленном суставе. В этом случае отмечается чрезмерная активация седалищных мышц и некорректная активация икроножных или больших подвздошных мышц. Цикл шага, как и в других типах походки, начинается с опоры на передний отдел стопы.
При пятом типе походки в фазе середины опоры отмечается опора всей стопы, но при согнутом коленном суставе. Такое положение конечности связано со спастичностью мышц задней поверхности бедра, которая сопровождается слабостью икроножной мышцы. Цикл шага также начинается с опоры на передний отдел стопы.
Разбор всех типов походки по Амстердамской классификации показал значительные изменения биомеханики ходьбы у ребёнка с ДЦП, независимо от типа походки. При этом у детей из одного класса по классификации GMFCS могут быть походки разных типов по Амстердамской классификации.
Необходимо учитывать, что Амстердамская классификация рассматривает только сагиттальную плоскость.
Во фронтальной плоскости при вальгусной или варусной деформации стопы значительно возрастает вальгусный или варусный момент силы. При этом противоположно направленный момент силы недостаточен, что приводит к нестабильности голеностопного сустава, которая усугубляется абдукцией или аддукцией стопы в горизонтальной плоскости.
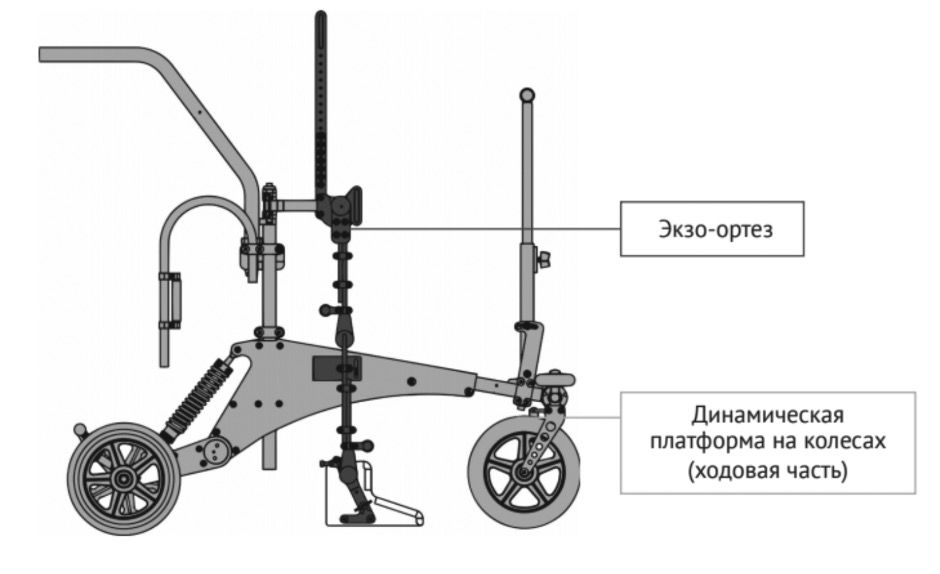
Тренажёр «ЭкзоБот» состоит из двух основных частей: ходовой части и экзо-ортеза.
Задача мультидисциплинарной команды специалистов — улучшить баланс и биомеханику ходьбы ребёнка с ДЦП за счёт стабилизации крупных суставов нижних конечностей и уменьшения дисбаланса мышц. В связи с этим ребёнку подбираются аппараты для нижних конечностей, различные виды технических средств реабилитации, поддерживающие больного во время ходьбы. Однако при использовании аппаратов только на голеностопные суставы невозможно полностью устранить приведение и внутреннюю ротацию бедра. А при использовании ходунков-роллаторов ребёнок продолжает начинать цикл шага с переднего отдела стоп или с соприкосновения всей стопой. При использовании тренажёра «ЭкзоБот» — аппарата на нижние конечности и туловище — за счёт фиксации стопы, голеностопного сустава, системы эластичных тяг и карабинов исключаются ротация бедра и абдукция или аддукция стопы. При этом, что является наиболее важным, цикл шага начинается с пятки. У ребёнка формируется правильный паттерн ходьбы во время занятий в данном тренажере, чего нельзя отметить во время самостоятельной ходьбы.
Данный тренажёр представляет собой динамическую платформу на колесах с различной грузоподъёмностью, к которой с помощью системы специальных креплений пациент фиксируется в области таза и груди, нижние конечности фиксированы в экзоортезе (рисунок). Перемещение осуществляется с помощью специальных эластичных тяг, расположенных в области коленного сустава и голеностопа. Благодаря им создается необходимый уровень усилия для приведения нижних конечностей в нормальное движение: ребёнок начинает цикл шага с контакта пяткой с поверхностью, за счёт фиксации стопы и голеностопного сустава и эластичных тяг исчезает абдукция или аддукция стоп, а также внутренняя ротация бёдер. Это улучшает фазу продвижения, т.к. исчезает дисбаланс между мышцами-разгибателями коленного и голеностопного суставов, а также между приводящими и отводящими мышцами бедра, исчезает наклон таза в сторону переносимой нижней конечности.
Таким образом, данный тренажёр стабилизирует голеностопный сустав, устраняя дисбаланс мышц нижних конечностей, способствует динамическому растяжению задней группы мышц голеней, формирует мышечную память. Всё это позволяет достичь хороших результатов в реабилитации детей с ДЦП.
Источник: https://doi.org/10.46563/1560-9561-2021-24-6-433-436;
Авторы статьи:
- Табе Евгения Эженовна , канд. мед. наук, зав. отд-нием амбулаторной нейроортопедии ФГАУ «НМИЦ здоровья детей».
- Шарков Сергей Михайлович , доктор мед. наук, проф., руководитель операционного блока ГБУЗ Морозовская ДГКБ ДЗМ, проф. каф. детской хирургии и урологии-андрологии им. проф. Л.П. Александрова, ФГАОУ ВО «Первый МГМУ им. И.М. Сеченова» Минздрава России (Сеченовский Университет).

24.11.2025 • Экзо Технологии • Полезное • 991
Читайте также


Оставить заявку на бесплатную консультацию
Наш менеджер перезвонит вам в течение нескольких часов
или позвоните нам
+7 (495) 118-25-88